 |
|
Infanzia
e
Secondaria di Primo Grado:
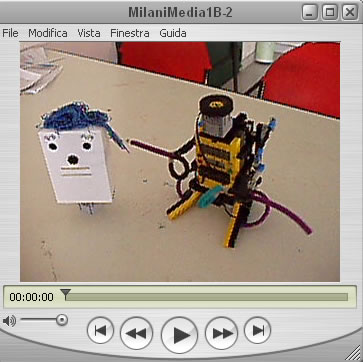
La Testa
ed il Robot
![]()
Il
13 aprile 2007 ragazze/i della classe 1B
della secondaria di primo grado
raggiungono la sez. G di scuola dell’infanzia
insieme al loro insegnante, Giuseppe Patti.

Valeria, Giulia, Leonardo e Federico
[ filmato 01 in QTime ] - [ filmato 02 in avi ]
 |
Leonardo,
Federico, Giulia e Valeria presentano alla classe il robot che
hanno costruito. Si tratta di un Lego Mindstorms Robotics Invention
System 2.0 |
| |
|
 |
Bambine/i
si domandano se il robot e’ capace o meno di muoversi. |
| |
|
 |
Il
robot viene cosi’ messo a confronto con quello “statico” (Robot
Sapiens) donato da Luciano alla nostra classe.
Leonardo: |
| |
|
 |
A questo punto Federico attiva il robot attraverso il bottone che si trova davanti… un po’ spostato a sinistra del robot. Giulia: |
| |
|
 |
Federico
e Giulia evidenziano alcune sue caratteristiche. Il
robot ha gia’ una sua testa… ma nel gioco delle trasformazioni…
si pensa di verificare le condizioni per cambiare la sua fisionomia
grazie alle teste che sono gia’ state realizzate in questi mesi
da bambine/i – ragazze/i dai 3 ai 16 anni. |
| |
|
 |
Giuseppe
Patti fa vedere il pezzo che ragazze/i hanno individuato come
adatto al collegamento con una delle molte teste che abbiamo
in classe. |
| |
|
 |
Anche
Francesca F. suggerisce alcune possibili soluzioni al “problema”.
Cerchera’ la testa il bambino o la bambina che calcolera’ quando
fa 4+3 |
| |
|
 |
 |
| |
|
 |
La soluzione “7” viene data da Francesca C. Federico e Giulia propongono una regola per il calcolo ed una verifica con le dita della somma esatta. |
| |
|
 |
Francesca
C. cerca tra le molte teste quella che potrebbe andare bene
per il robot. Bambine/i insieme a ragazze/i valutano le caratteristiche
che la testa dovrebbe avere. |
| |
|
 |
Francesca
C. ne prende in mano una; anche se leggera, decide che non va
bene perche’, cosi’ come riconoscono un po’ tutti i presenti,
e’ troppo grande e non potrebbe essere sostenuta dal piccolo
corpo del robot. |
| |
|
 |
Francesca
C. cerca ancora nello scatolone con le teste piu’ piccole. |
| |
|
 |
Finalmente
ne trova una che potrebbe essere quella adatta. Si tratta della
testa che aveva realizzato Alessio
R. della primaria, classe 2 A. |
| |
|
 |
Leonardo
e Federico valutano le possibilita’ di attacco al resto del
corpo. C’e’ chi suggerisce un foro nel basso della “scatola
testa” … |
| |
|
 |
Federico
prova a fissare la testa grazie ad una ruota che stringe il
cartoncino al cubetto “lego-collo” |
| |
|
 |
Resta
da vedere se effettivamente il corpo riuscira’ a mantenere l’equilibrio
|
| |
|
 |
In
effetti il corpo, grazie alla “stabilita’” data dai “lunghi-piedi”
del robot, riesce a non perdere l’equilibrio. |
| |
|
 |
Leonardo
suggerisce alcune modifiche alla programmazione del robot cosi’
che la testa possa dire no, oscillando da sinistra a destra…
“...l’idea
è quella di azionare l’uscita B per creare il movimento
della testa”. |
| |
|
 |
Martina
chiede se c’e’ la possibilita’ di far dire anche di si’ al robot.
Ragazze/i ipotizzano che con questa nuova testa sia un’operazione
un po’ complicata, allora Andrea Fe. propone che il SI’ venga
detto con l’oscillazione del braccio dal basso verso l’alto. |
| |
|
 |
 |
| |
|
 |
Leonardo
si confronta col gruppo di bambine/i e ragazzi/i… sembra proprio
che si rendera’ necessaria qualche altra modifica nella programmazione. |
| |
|
 |
 |
| |
|
 |
Viene
riattivato il movimento del robot da Giulia con il braccio che
si alza e si abbassa.
Valeria: |
| |
|
 |
A
questo punto si vuole verificare se i pezzi di lego (statici)
che abbiamo in classe, possono andare a comporre il corpo del
robot. |
| |
|
 |
Nello
scatolone dei mattoncini lego Andrea Fe. e Valeria cercano di
trovare qualche pezzo da “donare” al robot |
| |
|
 |
Andrea
Fe. ne prova uno… e sembra proprio andare bene…. |
| |
|
 |
…
pero’ Leonardo spiega che il punto scelto non e’ adatto poiche’
corrisponde piu’ o meno all’ombellico del robot e che in quel
punto c’e’ la zona di contatto…
Giulia:
|
| |
|
 |
Infine
vengono ricomposti alcuni pezzi che nel mentre si erano staccati
dal robot.
Federico: |
| |
|
 |
Valeria,
Giulia, Leonardo e Federico ci salutano per tornare in classe.
Verranno di nuovo a trovarci per verificare insieme la nuova
programmazione del robot.
Giulia:
|
| |
|
|
|
Relazione
a piu’ mani scritta con Valeria, Giulia, Leonardo e Valentina
|
| |
|
|
|

 |

 _
_



